1. Modul Arduino
spesifikasi:
Grafik:
3. Servo
Gambar, spesifikasi dan grafik:
4. stepper motor
Spesifikasi motor server:
5. driver motor L293D6. Keypad
4.1 PWM (Pulse Width Modulation)
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar
pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan
kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding
lurus dengan amplitudo sinyal asli yang belum termodulasi.
Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).
Duty Cycle = tON / ttotal
tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high
atau 1)
tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah
(low atau 0)
ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut
jugadengan “periode satu gelombang”
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi
tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa
difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan
PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();
PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam
satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita
memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu
bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai
5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga
255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi
akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255 atau 64), maka
1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali
dalam 1 detik.
Aplikasi PWM berbasis mikrokontroler biasanya berupa, pengendalian kecepatan motor DC, Pengendalian Motor Servo, Pengaturan nyala terang LED. JENIS PWM 1. PWM Analog Pembangkitan sinyal PWM yang paling sederhana adalah dengan cara membandingkan sinyal gigi gergaji sebagai tegangan carrier dengan tegangan referensi menggunakan rangkaian op-amp comparator.
Cara kerja dari komparator analog ini adalah membandingkan gelombang tegangan gigi gergaji dengan tegangan referensi seperti yang terlihat pada Gambar dibawah
 |
| Gambar 3 Pembentukan Sinyal PWM |
Saat nilai tegangan referensi lebih besar dari tegangan carrier (gigi gergaji) maka output comparator akan bernilai high. Namun saat tegangan referensi bernilai lebih kecil dari tegangan carrier, maka output comparator akan bernilai low. Dengan memanfaatkan prinsip kerja dari komparator inilah, untuk mengubah duty cycle dari sinyal output cukup dengan mengubahubah besar tegangan referensi. Besarnya duty-cycle rangkaian PWM ini :
 |
| Gambar 4 Perhitungan Duty Cycle PWM |
PWM Digital Gambar
 |
| Gambar 5 Rangkaian PWM Digital |
4.2 ADC (Analog to Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang
digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi
utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog
menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan
pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal
analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam
sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki.
Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0
- 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC
pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino,
menggunakan pin analog input yang diawali dengan kode A( A0- A5 padaArduino Uno). Fungsi
untuk mengambil data sinyal input analog menggunakan analogRead(pin);
ADC = (Vin / Vreff) x 1023
Vin = tegangan yang masuk ke Arduino
Vreff = tegangan referensi pembacaan ADC pada Arduino (Default 5V)
1023 = arduino menggunakan 10 bit ADC
4.3 Interrupt
Interupsi adalah proses dalam sistem mikrokontroler yang menghentikan prosea program
utama akibat terjadinya pemicu tertentu dari suatu sumber interupsi dan memaksa sistem
mikrokontroler untuk mengeksekusi blok program layanan interupsi. Bila terjadi interupsi, mikroprosesor akan menghentikan dahulu apa yang sedang dikerjakannya dan mengerjakan
permintaan khusus tersebut.
Interupsi berguna untuk membuat sesuatu terjadi secara otomatis dalam program mikrokontroler dan dapat membantu memecahkan masalah pengaturan waktu. Tugas yang baik untuk menggunakan interupsi dapat mencakup membaca rotary encoder, atau memantau input pengguna.
4.4 Arduino Uno
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya
terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan
Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang
menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan
komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :
Arduino Uno
A. BAGIAN-BAGIAN ARDUINO UNO
1. POWER USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
2. POWER JACK
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
3. Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak
menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
4. Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
5. Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika
( 0atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat
digunakan untuk menghasilkan PWM.
6. Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca
sinyalatau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
7. LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik
denganbaik.
B. BAGIAN-BAGIAN PENDUKUNG
1. RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya
dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak.
Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic
Random Acces Memory).
4.5 Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct- unidirectional. Motor DC adalah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah (komutator). Dengan adanya insulator antara komutator, cincin belah dapat berperan sebagai saklar kutub ganda (double pole, double throw switch). Motor DC bekerja berdasarkan prinsip gaya Lorentz, yang menyatakan ketika sebuah konduktor beraliran arus diletakkan dalam medan magnet, maka sebuah gaya (yang dikenal dengan gaya Lorentz) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Kecepatan putar motor DC (N) dirumuskan dengan Persamaan berikut.
Gambar 7. Rumus Kecepatan Putar Motor DC
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.
Prinsip Kerja Motor DC
Gambar 8. Prinsip Kerja Motor DC
Kumparan ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan CB yang terletak tepat lurus arah fluks magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD akan berputar.
Hasil perkalian gaya dengan jarak pada suatu titik tertentu disebut momen, sisi aktif AD dan CB akan berputar pada porosnya karena pengaruh momen putar (T). Setiap sisi kumparan aktif AD dan CB pada gambar diatas akan mengalami momen putar sebesar :
T = F.r
Dimana :
T = momen putar (Nm) F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya lorentz. Hal ini berarti bahwa kedudukan garis netral sisi sisi kumparan akan berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu ditambah jumlah kumparan yang digunakan. Kumparan- kumparan harus diletakkan sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis, maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar. Struktur Motor DC dapat dilihat pada gambar berikut ini.
Gambar 9. Struktur Motor DC
4.6 servo
Motor servo adalah jenis motor listrik yang dirancang untuk memberikan output yang presisi dalam menyelesaikan pergerakan tertentu. Motor ini dilengkapi dengan kontroler yang memungkinkan presisi tinggi dalam mengatur posisi atau sudut rotor. Prinsip kerja motor servo didasarkan pada umpan balik atau feedback yang terus-menerus dari posisi rotor.
Prinsip kerja motor servo:
1. Umpan Balik (Feedback): Motor servo menggunakan sensor umpan balik, seperti potensiometer, enkoder, atau resolver, untuk terus memonitor posisi atau sudut rotor.
2. Kontroler:
- Kontroler servo menerima sinyal perintah untuk mencapai posisi tertentu.
- Kontroler membandingkan posisi aktual (yang diberikan oleh sensor umpan balik) dengan posisi yang diminta.
3. Error Signal:
- Jika terdapat perbedaan antara posisi aktual dan yang diminta, tercipta sinyal kesalahan (error signal).
4. Sinyal Penggerak (Drive Signal):
- Kontroler menghasilkan sinyal penggerak yang disesuaikan berdasarkan error signal.
- Sinyal penggerak mengontrol daya yang disuplai ke motor untuk mengoreksi perbedaan posisi.
5. Pergerakan Presisi:
- Motor servo merespons dengan mengubah posisi rotor untuk mengurangi error posisi.
- Proses ini berlanjut sampai posisi yang diminta tercapai.
Motor servo sering digunakan dalam aplikasi yang membutuhkan presisi tinggi, seperti robotika, peralatan CNC (Computer Numerical Control), peralatan audio profesional, dan banyak lagi. Keunggulan motor servo meliputi kemampuan untuk mengontrol kecepatan, torsi, dan posisi dengan sangat presisi, membuatnya ideal untuk aplikasi yang memerlukan akurasi dan kontrol yang tinggi.
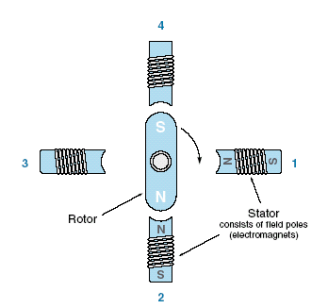
4.7 Motor Stepper
Motor stepper adalah motor DC yang khusus berputar dalam suatu derajat
yang tetap yang disebut step (langkah). Satu step antara 0,9 sampai 90°.
Motor stepper terdiri dari rotor dan stator. Rotor adalah permanen maget
sedangkan stator adalah elektromagnet. Rotor akan bergerak jika stator diberi
aliran listrik. Aliran listrik ini membangkitkan medan magnet dan membuat
rotor menyesuaikan dengan kutub magnet yang dimilikinya.
Motor stepper digunakan khusus menentukan posisi batang motor tanpat
harus mempergunakan sensor posisi. Hal ini dapat dilakukan dengan cara
menghitung jumlah step yang harus diberikan dari posisi acuan. Ukuran dari
step ditentukan oleh jumlah rotor dan kutub stator. Tidak ada kesalahan
kumulatif yaitu kesalahan sudut tidak terus bertambahan dengan
meningkatnya step.
Gambar 10. Motor Stepper
Motor stepper bekerja secara lup terbuka, yaitu pengatur mengirimkan
sejumlah step ke motor untuk menggerakkan rotor ke posisi yang diinginkan.
Sebagai contoh motor stepper pada floppy disk drive. Motor stepper memiliki
kecepatan yang rendah dan sering digunakan tanpa reduksi gigi gerigi (gear
reduction). Suatu jenis motor stepper dengan 500 pulsa/detik akan berputar
150 rpm. Tetapi motor stepper dapat dibuat berputar 1 rpm atau kurang
dengan akurasi yang tinggi. Terdapat tiga jenis motor stepper yaitu magnet
permanen, variable reluctance dan hibrid.
4.8 Driver Motor L293D
L293D Motor Driver Shield adalah suatu modul yang dirancang khusus untuk mengendalikan motor DC dengan mudah menggunakan mikrokontroler atau papan pengembangan seperti Arduino. Berikut adalah beberapa informasi umum tentang L293D Motor Driver Shield:
Karakteristik L293D Motor Driver Shield:
Tipe: Motor Driver Shield, yang dirancang untuk mempermudah pengendalian motor DC.
Kompatibilitas: Biasanya dirancang untuk kompatibilitas dengan platform pengembangan seperti Arduino Uno.
Kapasitas Arus:
L293D Motor Driver Shield mampu menangani arus hingga beberapa amper, tergantung pada modelnya.
Tegangan Kerja:
Biasanya dapat bekerja pada tegangan 5V hingga 12V, yang membuatnya cocok untuk motor DC umum.
Jumlah Motor yang Dapat Dikendalikan:
Motor Driver Shield L293D dapat mengendalikan dua motor DC secara independen.
Pengendalian Kecepatan dan Arah:
Mampu mengendalikan kecepatan dan arah putaran motor DC.
Socket atau Pin untuk Mikrokontroler:
Dilengkapi dengan socket atau pin khusus untuk menyambungkan papan pengembangan atau mikrokontroler.
4.9 Keypad
Keypad adalah bagian penting dari suatu perangkat elektronika yang membutuhkan interaksi manusia. Keypad berfungsi sebagai interface antara perangkat (mesin) elektronik dengan manusia atau dikenal dengan istilah HMI (Human Machine Interface). Matrix keypad 4×4 pada artikel ini merupakan salah satu contoh keypad yang dapat digunakan untuk berkomunikasi antara manusia dengan mikrokontroler. Matrix keypad 4×4 memiliki konstruksi atau susunan yang simple dan hemat dalam penggunaan port mikrokontroler. Konfigurasi keypad dengan susunan bentuk matrix ini bertujuan untuk penghematan port mikrokontroler karena jumlah key (tombol) yang dibutuhkan banyak pada suatu sistem dengan mikrokontroler. Konstruksi matrix keypad 4×4 untuk mikrokontroler dapat dibuat seperti pada gambar berikut. Konstruksi Matrix Keypad 4×4 Untuk Mikrokontroler Konstruksi matrix keypad 4×4 diatas cukup sederhana, yaitu terdiri dari 4 baris dan 4 kolom dengan keypad berupas saklar push buton yang diletakan disetiap persilangan kolom dan barisnya. Rangkaian matrix keypad diatas terdiri dari 16 saklar push buton dengan konfigurasi 4 baris dan 4 kolom. 8 line yang terdiri dari 4 baris dan 4 kolom tersebut dihubungkan dengan port mikrokontroler 8 bit. Sisi baris dari matrix keypad ditandai dengan nama Row1, Row2, Row3 dan Row4 kemudian sisi kolom ditandai dengan nama Col1, Col2, Col3 dan Col4. Sisi input atau output dari matrix keypad 4×4 ini tidak mengikat, dapat dikonfigurasikan kolom sebagi input dan baris sebagai output atau sebaliknya tergantung programernya.
Proses Scaning Matrix Keypad 4×4 Untuk Mikrokontroler Proses scaning untuk membaca penekanan tombol pada matrix keypad 4×4 untuk mikrokontroler diatas dilakukan secara bertahap kolom demi kolom dari kolom pertama sampai kolom ke 4 dan baris pertama hingga baris ke 4. Program untuk scaning matrix keypad 4×4 dapat bermacam-macam, tapi pada intinya sama.
4.10 Dipswitch
Dip Swtich

DIP switch, atau Dual Inline Package switch, adalah jenis saklar yang terdiri dari beberapa saklar kecil yang terpasang dalam paket berbentuk baris ganda pada rangkaian elektronik terpadu atau modul. Setiap saklar memiliki dua posisi, ON dan OFF, yang digunakan untuk konfigurasi atau pengaturan pada perangkat elektronik, seperti menetapkan alamat atau parameter lainnya. DIP switch umumnya memberikan kemudahan penggunaan tanpa memerlukan keahlian khusus dalam pengaturan, meskipun beberapa pengembang kini beralih ke metode konfigurasi yang lebih canggih.
DIP switch, atau Dual Inline Package switch, bekerja berdasarkan prinsip sederhana saklar elektronik yang dapat berada dalam dua posisi, ON (hidup) atau OFF (mati). Dalam konteks penggunaannya pada rangkaian terpadu atau modul, setiap saklar DIP switch merepresentasikan satu bit informasi. Ketika saklar dalam posisi ON, itu menghubungkan pin terkait, sementara posisi OFF memutuskan hubungan. Pengaturan atau konfigurasi tertentu dapat dicapai dengan mengatur posisi ON atau OFF dari masing-masing saklar DIP switch sesuai dengan kebutuhan aplikasi. DIP switch sering digunakan untuk pengaturan alamat atau parameter lainnya dalam rangkaian elektronik tanpa memerlukan pemrograman atau perangkat lunak tambahan.
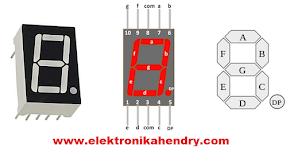
Seven SegmentLayar tujuh segmen ini seringkali digunakan pada jam digital, meteran elektronik, dan perangkat elektronik lainnya yang menampilkan informasi numerik. Layar tujuh segmen ini terdiri dari 7 buah LED yang membentuk angka 8 dan 1 LED untuk titik/DP. Angka yang ditampilkan di seven segmen ini dari 0-9. Cara kerja dari seven segmen disesuaikan dengan LED. LED merupakan komponen diode yang dapat memancarkan cahaya. kondisi dalam keadaan ON jika sisi anode mendapatkan sumber positif dari Vcc dan katode mendapatkan sumber negatif dari ground.
4.12 Dot-Matrix
Dot matrix 8x8 adalah tipe tampilan atau display yang terdiri dari susunan titik-titik (dot) dalam format matriks berukuran 8x8. Artinya, terdapat 8 baris dan 8 kolom titik, membentuk total 64 titik yang dapat diatur untuk menampilkan karakter, grafik, atau pola tertentu. Setiap titik atau elemen dalam matriks dapat dinyalakan atau dimatikan secara independen, memungkinkan pembentukan berbagai karakter atau gambar.
Penggunaan dot matrix 8x8 umumnya ditemukan pada layar kecil pada perangkat-perangkat seperti jam digital, alat pengukur, atau panel informasi kecil. Tampilan ini dapat diatur untuk menampilkan angka, huruf, atau bahkan animasi sederhana dengan mengatur kombinasi titik-titiknya.
Kontrol dot matrix 8x8 melibatkan sinyal untuk setiap baris dan kolom, diatur untuk menyalakan atau mematikan setiap titik sesuai kebutuhan untuk membentuk karakter atau gambar yang diinginkan. Kelebihan dot matrix adalah fleksibilitasnya dalam menampilkan informasi yang beragam dengan jumlah titik yang relatif kecil, meskipun resolusi tampilannya terbatas.
Prinsip kerja dot matrix 8x8 didasarkan pada kemampuan setiap titik atau elemen dalam matriks untuk diatur secara independen, membentuk gambar atau karakter tertentu. Matriks ini terdiri dari 8 baris dan 8 kolom titik, menciptakan total 64 titik yang dapat dinyalakan atau dimatikan. Prinsip kerja umumnya melibatkan kontrol terhadap setiap baris dan kolom untuk menyalakan atau mematikan titik-titik sesuai dengan informasi yang ingin ditampilkan.
Langkah-langkah umum prinsip kerja dot matrix 8x8:
1. Pemilihan Baris (Rows): Sinyal arus diterapkan pada satu baris pada satu waktu. Ini berarti satu per satu, setiap baris akan diaktifkan.
2. Pemilihan Kolom (Columns): Pada saat yang sama, sinyal tegangan diterapkan pada satu atau lebih kolom yang ingin diaktifkan.
3. Penyalaan atau Pemadaman Titik: Pada persimpangan antara baris dan kolom yang diaktifkan, titik-titik yang diinginkan dinyalakan dengan memberikan arus. Pada titik-titik lain di matriks, yang tidak diaktifkan, titik tetap dimatikan.
4. Pemindahan Ke Baris dan Kolom Selanjutnya: Proses ini diulang secara berulang-ulang untuk setiap baris dan kolom secara berurutan, sehingga kesan visual karakter atau gambar terbentuk.
Kontrol ini dapat dilakukan dengan menggunakan mikrokontroler atau driver display khusus yang mengontrol aliran arus dan tegangan pada setiap baris dan kolom. Dengan cara ini, dot matrix 8x8 dapat menampilkan berbagai karakter, angka, atau bahkan grafik dengan mengatur kombinasi titik-titiknya sesuai kebutuhan.
4.13 LCD
Liquid Crystal Display (LCD)Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).
Gambar Penampang komponen penyusun LCD
Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.
4.14 Sensor Infrared
Sensor Infrared
Sensor infrared (IR) adalah perangkat elektronika yang dirancang untuk mendeteksi radiasi inframerah dalam spektrum elektromagnetik. Radiasi inframerah adalah bentuk radiasi panas yang tidak terlihat oleh mata manusia. Sensor infrared mengonversi energi radiasi inframerah menjadi sinyal listrik yang dapat diukur. Ada dua jenis sensor infrared utama: sensor pasif dan sensor aktif.
1. Sensor Infrared Pasif: Sensor ini mendeteksi radiasi inframerah yang dipancarkan atau dipantulkan oleh objek atau tubuh yang memiliki suhu lebih tinggi daripada nol absolut. Sensor pasif sering digunakan dalam aplikasi deteksi gerak (PIR sensor) untuk mengidentifikasi perubahan suhu yang terkait dengan pergerakan manusia atau objek.
2. Sensor Infrared Aktif: Sensor ini menghasilkan radiasi inframerah sendiri dan kemudian mendeteksi pantulan atau perubahan dalam pantulan tersebut. Sensor ini sering digunakan dalam aplikasi pengukuran jarak (seperti sensor ultrasonik atau lidar) dan komunikasi inframerah.
Sensor infrared memiliki berbagai aplikasi, termasuk di dalam pengendalian jarak jauh, perangkat keamanan, sistem kendali otomatis, dan perangkat medis. Keunggulan sensor infrared termasuk kemampuan bekerja dalam kondisi cahaya rendah atau gelap dan kemampuan mengukur suhu objek tanpa kontak fisik.
Prinsip kerja sensor infrared tergantung pada jenis sensor dan aplikasinya. Secara umum, prinsip kerja sensor infrared melibatkan deteksi radiasi inframerah dan konversi energi inframerah menjadi sinyal listrik yang dapat diukur. Ada dua jenis utama sensor infrared: sensor pasif dan sensor aktif.
1. Sensor Infrared Pasif:
- Deteksi Radiasi: Sensor pasif mendeteksi radiasi inframerah yang dipancarkan atau dipantulkan oleh objek atau tubuh yang memiliki suhu lebih tinggi daripada nol absolut. Ini dapat mencakup perubahan suhu yang terkait dengan pergerakan manusia atau objek.
-Konversi Menjadi Sinyal Listrik: Ketika radiasi inframerah tertangkap, sensor mengonversinya menjadi sinyal listrik melalui elemen detektor termal atau pyroelektrik.
- Aplikasi: Sensor pasif, seperti sensor deteksi gerak PIR (Passive Infrared), sering digunakan dalam sistem keamanan atau otomatisasi rumah untuk mendeteksi perubahan suhu yang diindikasikan oleh pergerakan.
2. Sensor Infrared Aktif:
- Pancaran Radiasi: Sensor aktif menghasilkan sendiri radiasi inframerah, kemudian mendeteksi pantulan atau perubahan dalam pantulan tersebut.
- Konversi Menjadi Sinyal Listrik: Sinyal pantulan atau perubahan dalam intensitas pantulan diukur dan dikonversi menjadi sinyal listrik oleh elemen detektor seperti fotodioda atau fototransistor.
- Aplikasi: Sensor infrared aktif digunakan dalam pengukuran jarak (lidar, sensor ultrasonik) dan komunikasi inframerah.
Prinsip kerja sensor infrared memanfaatkan sifat radiasi inframerah yang tidak terlihat oleh mata manusia dan kemudian mengonversinya menjadi bentuk sinyal yang dapat diolah untuk berbagai aplikasi.



























.png)









Tidak ada komentar:
Posting Komentar